5. A grafikus megjelenítési folyamat¶
A teljes megjelenítési folyamatot, mint egy transzformációs láncot képzelhetjük el.
Mivel egy cső, futószalag szerű feldolgozásról van szó, ezért ezt szokták nézeti csővezeték nek, vagy angolul rendering pipeline -nak hívni.
Nem egyetlen konkrét kialakítás van.
Különböző absztrakciós szinteken szokták tárgyalni.
https://web.cse.ohio-state.edu/~shen.94/781/Site/Slides_files/pipeline.pdf
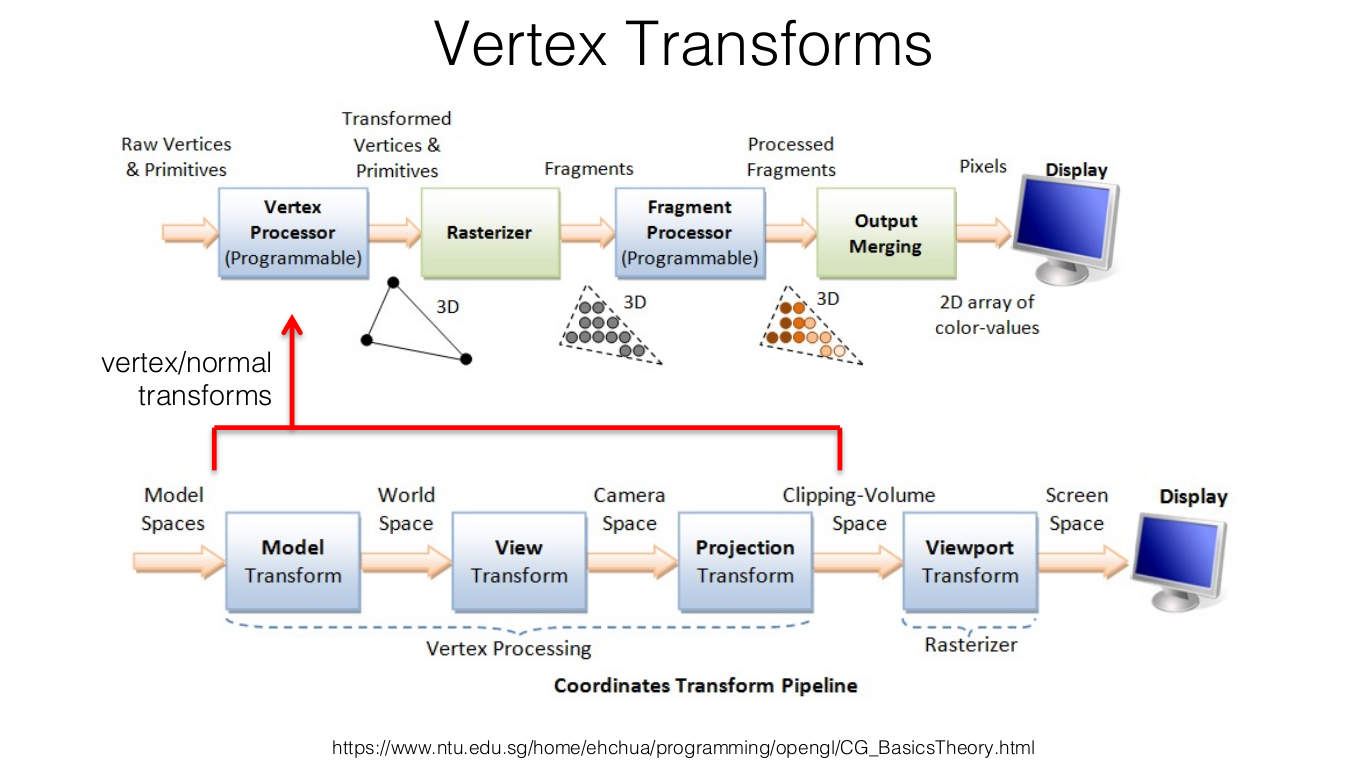
A megjelenítési folyamathoz tartozó fő transzformációk tehát:
Modell transzformáció,
Nézeti transzformáció,
Vetítési transzformáció,
Képtér transzformáció.
A modellek és a kamera transzformációját a korábbi témákból már ismerjük. Aktuálisan azt vizsgáljuk, hogy milyen további módszerek szükségesek ahhoz, hogy valószerűbbé, és hatékonyabbá tehessük a megjelenítést.
5.1. Láthatóság¶
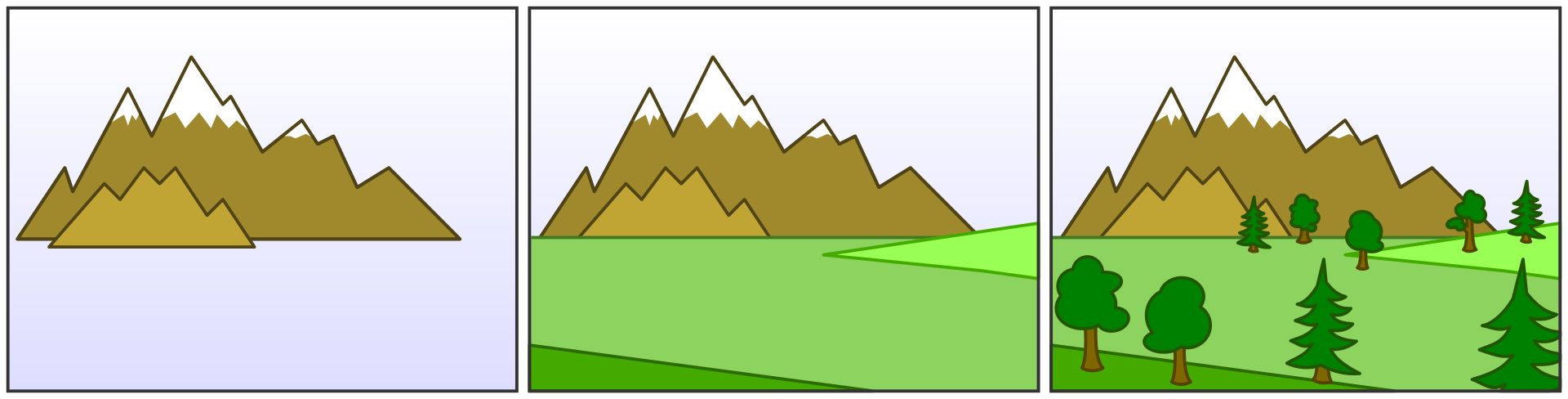
A vetítési transzformációk önmagukban nem garantálják, hogy csak az látszódjon a képen, aminek a kamerából ténylegesen kellene. Az objektumok kirajzolásának sorrendjétől függhet az, hogy mi látszik majd a képen.
Takarási problémaként hivatkozunk arra a feladatra, amely során megállapítjuk, hogy a színtér mely részeinek kell látszódnia, és melyek lesznek takarásban az eredményként kapott képen.
Mivel a festésnél is hasonló problémáról van szó, ezért a közvetlen sorbarendezést használó algoritmust szokták nevezni painter’s algorithm-nek is:
Az algoritmusnak nem minden esetben lehet egyáltalán megoldása, hogy ha egy objektum kirajzolását egy elemi lépésnek tekintjük.
\(\rhd\) Adjunk példát olyan esetre, amelyet sorbarendezéssel nem lehet megoldani!
A következőkben a láthatósági probléma lehetséges megközelítéseit vizsgáljuk.
5.1.1. Objektumok sorba rendezése¶
Egyszerűbb (speciális) esetekben megtehetjük azt, hogy előre meghatározzuk az objektumok megjelenítési sorrendjét, és a szerint rajzoltatjuk ki őket.
Feltételezzük, hogy egy-egy objektumot önmagában megfelelően meg tudunk jeleníteni. (Konvexek, és a hátsó lapjaik nem látszódnak.)
A sorrend meghatározása függ az összes objektum és a kamera pozíciójától is.
Általános esetben nem oldja meg a problémát.
\(\rhd\) Vizsgáljuk meg egy-egy konkrét esetre, hogy hogyan tudnánk megoldani a sorbarendezést!
5.1.2. Háromszögek sorba rendezése¶
Egy fokkal általánosabb megoldást kapunk, hogy ha az objektumok kirajzolásához használt háromszögeket rendezzük sorba.
Lényegesen nagyobb a számításigénye, mint az objektum szintű rendezésnek.
Az egymást metsző háromszögek problémájával nem tud mit kezdeni.
5.1.3. Z-buffer¶
A láthatóság vizsgálatát képpontok szintjén szeretnénk elvégezni. Ehhez definiálunk egy buffert, amely a megjelenített térbeli pont kamerától vett távolságát tartalmazza.
Amikor egy képpontot meg szeretnénk jeleníteni, akkor először
kiszámítjuk, hogy az milyen távolságra van a kamerától,
hogy ha ez a távolság kisebb, mint a Z-buffer adott helyen vett értéke, akkor megjelenítjük, és felülírjuk a Z-buffer értékét,
hogy ha nem, akkor felhagyunk a képpont megjelenítésével.
A módszer előnye, hogy
általánosan megoldja a takarási problémát, és
egyszerűen implementálható.
Hátránya, hogy
külön buffer szükséges a mélységértékek tárolásához. (Manapság ez már nem lényegi probléma.)
Az átlátszóságot, féligátlátszóságot nem tudja kezelni. (Egy közeli átlátszó elem „kitakarja” a mögötte lévő objektumokat.)
\(\rhd\) Vizsgáljuk meg két egymás mögötti négyzetre, hogy hogy működik az alkalmazás, hogy ha be-, és ha kikapcsoljuk a Z buffert!
glBegin(GL_QUADS);
glColor3f(1, 0, 0);
glVertex3f(0, 0, 0);
glVertex3f(0, 0, 1);
glVertex3f(1, 0, 1);
glVertex3f(1, 0, 0);
glColor3f(0, 1, 0);
glVertex3f(0, 1, 0);
glVertex3f(0, 1, 1);
glVertex3f(1, 1, 1);
glVertex3f(1, 1, 0);
glEnd();
A számábrázolásból adódóan közel azonos Z értékekre „érdekes” megjelenítést kaphatunk:
\(\rhd\) Állítsuk át az előző példát, hogy közel egymáson legyenek a négyzetek, és nézzük meg az eredményt!
glBegin(GL_QUADS);
glColor3f(1, 0, 0);
glVertex3f(0, 0, 0);
glVertex3f(0, 0, 1);
glVertex3f(1, 0, 1);
glVertex3f(1, 0, 0);
glColor3f(0, 1, 0);
glVertex3f(0, 1e-5, 0);
glVertex3f(0, 0, 1);
glVertex3f(1, 0, 1);
glVertex3f(1, 0, 0);
glEnd();
5.1.4. Hátsó lapok eldobása¶
A megjelenített objektumokat gyakran 3 dimenziós testeknek nevezzük, de technikailag általában csak a felületükkel szoktunk foglalkozni (mivel ez az, amivel a fény kölcsönhatásba lép). Mivel a hátsó lapok egy alakzatnál nem látszódnak, ezért megtehetjük, hogy nem próbáljuk meg megjeleníteni azokat.
Egy lapról úgy tudjuk eldönteni, hogy az elülső, vagy hátsó lap, hogy megnézzük, hogy a felületi normálisa milyen szöget zár be a kamera nézőpontjával.
Mivel egy nagyon egyszerű feltételről van szó, ezért triviális lapeldobásként szoktunk rá hivatkozni.
OpenGL-ben a következőképpen lehet bekapcsolni:
glEnable(GL_CULL_FACE);
Be lehet állítani, hogy az elülső, vagy a hátsó lapok kerüljenek-e eldobásra.
glCullFace(GL_FRONT);
glCullFace(GL_BACK);
5.2. Félig átlátszó felületek megjelenítése¶
A Z-buffer használata abból a feltételezésből indul ki, hogy a közelebb lévő pontok eltakarják a hátrébb lévőket. Hogy ha átlátszó felületrészekkel, vagy félig átlátszó felületekkel dolgozunk, akkor ez nem teljesül.
5.3. Dupla bufferelés, tripla bufferelés¶
Alapvetően az alakzatok (többségében háromszögek) kirajzolása szekvenciálisan, sorrendben történik. A megjelenítendő kép létrehozása közben lévő tranziens állapotokat viszont általában nem szeretnénk látni.
A dupla bufferelés azt feltételezi, hogy van egy megjelenített (front buffer) és egy rejtett (back buffer) képbufferünk.
Az algoritmusa egyszerűen a következő:
Rajzoljunk a rejtett bufferbe.
Amikor elkészült a megjelenítendő kép, akkor cseréljük meg a rejtett és a megjelenített buffereket.
Az utóbbi tipikusan jelentheti akár csak egy mutató átállítását. Általában az ehhez tartozó függvény neve tartalmazza a swap szót, például SwapBuffer.
A tripla bufferelés akkor lehet szükséges, hogy ha a videókártyáról a kép másolása várni kellene arra, hogy a következő kép összeállítása megkezdődhessen.
\(\rhd\) Ábrázoljuk, hogy milyen három fázisa van a tripla bufferelésnek!
5.4. Modellformátumok¶
5.4.1. Wavefront OBJ¶
Wavefront Technologies, 1984.
Egyszerű, szöveges formátum
A sorok első szava jelzi, hogy milyen adatokat tartalmaz a sor.
Egy háromszög paraméterei:
f v1/vt1/vn1 v2/vt2/vn2 v3/vt3/vn3
\(\rhd\) Nézzünk bele néhány .obj kiterjesztésű modellfájlba!
5.4.2. STL formátum¶
STereoLithography
Albert Consulting Group for 3D Systems, 1987.
Főként 3D nyomtatásnál használják
Szöveges és bináris formátumként is használják.
https://danbscott.ghost.io/writing-an-stl-file-from-scratch/
solid dart
facet normal 0 1 0
outer loop
vertex 3 1 2
vertex 2 0 -1
vertex 8 4 2
endloop
endfacet
facet normal 0 0 1
outer loop
vertex 3 9 -10
vertex 5 1 3
vertex 4 7 -2
endloop
endfacet
endsolid
5.4.3. 3DS formátum¶
Autodesk 3D Studio, 3ds MAX
Bináris formátum
5.5. Kérdések¶
Milyen fő transzformációk tartoznak a megjelenítési folyamathoz?
Mit nevezünk láthatósági problémának?
Hogyan működik a festő algoritmus?
Például milyen esetet nem képes megoldani a festő algoritmus?
Mire szolgál a mélységbuffer és hogyan működik?
Mire szolgál a hátsó lapok eldobása, és hogyan működik a módszer?
Miért van szükség dupla bufferelésre?
Hogyan működik a dupla bufferelés?
Milyen előnyei és hátrányai vannak az adatok bináris és a szöveges fájlokban történő tárolásának?
A modellekhez milyen adatok tartoznak, amelyeket az OBJ fájlokban tárolunk?
Milyen módon tárolja az Wavefront OBJ szabványa a modellekhez tartozó adatokat?
Egy betöltött modellt meg tudunk-e jeleníteni több különböző helyen a virtuális terünkben?
Hogyan néz ki egy tetraéder adatait tartalmazó OBJ fájl?
Mennyi számértéket fog tartalmazni egy szabályos oktaéder adatait tartalmazó OBJ fájl?
Hogyan tárolja az OBJ fájl magukat a textúrákat?
Miért előnyös, hogy ha a normálvektorok le vannak tárolva a modellfájlban?
5.6. Számítási feladatok¶
Tegyük fel, hogy egy \(1024 \times 768\) felbontású képet szeretnénk megjeleníteni! A mélységbufferünkben a távolságok számításához használjunk dupla pontosságú lebegőpontos számokat. Mennyi helyet foglal így a mélységbuffer?
5.7. Programozási feladatok¶
5.7.1. Origin¶
Töltsük le és nézzük át a origin példát az me-courses repository-ból, majd végezzük el az alábbi módosításokat!
Oldjuk meg, hogy a kamerát függőlegesen is lehessen mozgatni felfelé és lefelé
qésebillentyűk segítségével!Állítsuk be a
jéslbillentyűkre a kamera balra és jobbra forgatását!Az egységkockán belül jelenítsünk meg egy színes háromszöget, melynek sárga, cián és magenta színűek a sarkai!
Jelenítsünk meg egy szürke (tesszellált) gömböt az egységkockán belül!
Válasszuk kicsire a tesszelláció mértékét, és forgassuk meg a gömböt egyenletes sebességgel valamelyik tengely körül!
Írjuk át a kamera kezelését úgy, hogy a Google Maps-hez hasonlóan lehessen forgatni a nézetet!
Rajzoljunk ki egy sakktábla mintát az egységkockánk x-y síkjába (ahol z értéke 0)!
Rajzoljuk ki egy henger és egy kúp közelítését! Használjuk hozzá a triangle strip és triangle fan primitíveket!